With the rapid development of Internet of Things technology, people’s lifestyle and work habits are gradually changing. Faced with a variety of intelligent devices, how to achieve unified control of them has become an urgent problem to be solved. In this paper, a new type of somatosensory controller is designed, which uses NRF905 based on radio frequency technology as communication module, STM32 as main control chip, and MPU6050 and other sensors to collect wrist motion information. The controller realizes the recognition of human body’s characteristic actions and the control of various intelligent devices, which makes the communication between users and intelligent devices more convenient and has certain use value. In recent years, with the popularity of hi tech digital products such as smart TV and tablet computers, honey has achieved intuitive and fresh experience in user experience through various human-machine interaction. For example, Kinect, which realizes dynamic capture and image recognition from 3D through body sense photography, realizes tracking all 10 fingers by infrared camera, and identifies LeapMotion with accuracy up to 1/100 mm; and MYO Labs wrist band, which identifies user gestures, has been launched by Canadian startup Thalmic Labs. It can be seen that the wireless body sense control device is playing an important role in pushing the development of the Internet of animals, so it has become a hot spot with high demand value. This paper gives a systematic exposition and application design around this content. Wireless somatosensory controller can control any communication device with matching device by operator gesture. For example, the machine car, the computer cursor, the UAV and so on [2].
The system uses intelligent car to simulate the controlled equipment, and evaluates the practicability of the equipment through the trajectory of intelligent car. The main working principle of the control equipment is to collect gesture action through the six axis sensor MPU6050. It is processed by the STM32 microcontroller and sent to the controlled device through RF905.
The controlled device is equipped with the same communication chip. After receiving the data, it is sent to the 51 chip for processing and performing corresponding action [3]. The wireless somatosensory controller designed in this paper can be divided into two parts.

The transmitter consists of the main control chip, NRF905 wireless transmitter module and MPU6050 six-axis motion processing module. The block diagram of the wireless somatosensory control terminal is shown in Figure 1. The receiver is simulated by an intelligent car, which is composed of 51 main control chip, DC motor, NRF905 wireless transmitter module and so on.
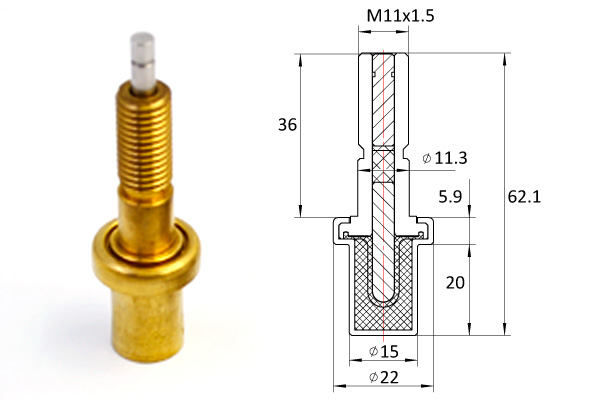
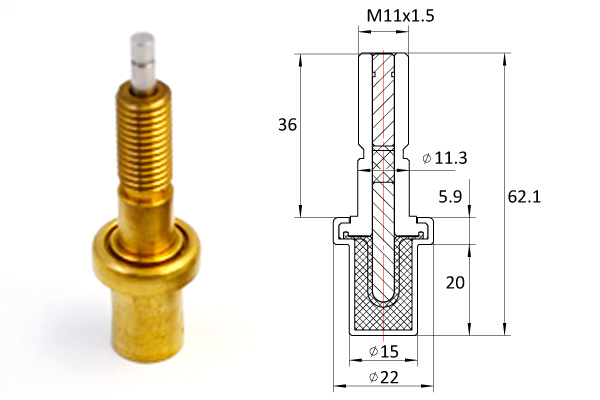
For wireless somatosensory control terminals, in order to achieve good operation results and present the best user interaction experience, 6-axis motion processing components are selected to recognize user gestures. Moreover, because of the need to continuously collect data such as angle and real-time data processing, the design target will be pointed, thermostatic element so the working frequency of microcontroller and the capacity of program memory will be put forward certain requirements. The system takes STM32F103C8T6 MCU as its control core. STM32F103C8T6 MCU is a low power microprocessor powered by 3.3V. Its working frequency can reach 72MHz and 64K program memory. Its performance is stronger than ordinary 8051, and its cost is lower. It can meet the needs of more complex application system design.
The actual connection layout of the microprocessor is shown in Figure 2. The controller is powered by 5V polymer lithium battery. Because the working voltage of STM32F103C8T6 and NRF905 are 3.3V, ASM1117-3.3 voltage regulator chip is selected to provide 3.3V voltage for the system.
It is necessary to mention that STM32F103C8T6 is divided into analog and digital. In order to ensure its normal operation, two power sources can be isolated design, that is, between analog and digital through 0_resistance to achieve single point common ground. Wireless transmitter module is the specific implementation executable process of terminal data transmission. NRF905 chip is a wireless transceiver chip based on RF communication technology.
Its working power supply voltage is 3.3V and output power is adjustable – 10 – 10dBm. It can be directly programmed and configured by SPI interface. The NRF905 application circuit is shown in Figure 3.
In the somatosensory detection part, the six-axis motion processing module MPU-6050 is used for gesture recognition. The three-axis MEMS gyroscope detects the angular velocities of X-axis, Y-axis and Z-axis respectively.
The somatosensory detection circuit is shown in Figure 4. The main function of the receiving device is to judge the data sent by the wireless somatosensory control terminal and make forward, backward, left and right turn responses. The hardware of the device is mainly composed of 51 MCU, receiving module and four DC motors. The circuit of receiving module is almost the same as that of control terminal. DC motor needs 7.2V power supply, and L293D is its core driving circuit. The software part of the system includes the sender program and the receiver program. The main function of the sender program is to recognize gesture information and control NRF905 wireless module to send gesture information in real time.
The receiver mainly receives and judges data and responds to different gestures. All programs of this system are programmed in C language to realize modulation. Firstly, we collect gesture information and provide initial configuration for MPU6050. The specific contents include: configuring REG_PWR_MGMT_1 register to achieve soft reset MPU6050; configuring REG_ CONFIG register to divide into accelerometer and setting sampling rate for gyroscope to 8Khz; configuring REG_ GYRO_ CONFIG register to make gyroscope range 2000 s; configuring maximum range of accelerometer to 8g; configuring REG_ INT_ABEN.
LE customizes its terminal generation to Motio detectoin, which means interruption if there is an action. At this point, the MPU6050 initialization configuration is over. After initialization of MPU6050, the main control chip will read the data register of MPU6050 through I2C bus and fuse the corresponding algorithm to get the corresponding Euler angle. The purpose of gesture recognition can be achieved by discriminating the Euler angle. The configuration of NRF905 register can be described as follows: after initializing NRF905, the corresponding result is that the output power is 10dB, the external 16MHZ crystal oscillator, the transmission address width is 4 bytes, and the data width is 4 bytes. The nRF905 register is configured in 433MHz working frequency band, and the hfreq ﹣ PLL position is “0”, so that the frequency difference between channels is 100kHz. The TRX_CE pin of NRF905 is set at “1” and the TX_EN pin is set at “0” to make NRF905 enter the sending mode. The DR pin will be set up to notify the MCU that the data has been sent after an action data package is sent. MCU judges that after sending, NRF905 will be configured in normal mode and transferred to the input state of detection action, and continue to collect the next action, so as to cycle back and forth [6]. The control terminal program block diagram is shown in Figure 5. The receiving and processing center configures NRF905 as receiving mode, receives gesture information and implements it. In initialization, the CH_NO bit of NRF905 configuration register is set to 0X4C to work at 430MHz frequency, while the HFREQ_PLL bit is set at “0” and the frequency difference between channels is 100KHZ. Setting TRX_CE= “1” and TX_EN= “0” of NRF905 to make it in the receiving state, NRF905 will automatically detect the carrier, after receiving the same frequency carrier, the carrier detection pin AM will be set high, and after receiving the correct data, the DR pin will be set high accordingly.

After completing the above settings, the MCU will read the received gesture information data and perform forward, backward, left and right turn actions according to the information.
This paper combines STM32F103C8T6 MCU, NRF905 wireless transmitter module and MPU6050 to design and implement a new type of wireless somatosensory controller, which can control the matching communication equipment by operator gesture. For example, the machine car, the computer cursor, the UAV and so on. It laid the foundation for the ideal planning practice of smart home, and has certain practical promotion value.