In order to solve the connection and difference between zero-pole placement design controller and digital PID controller of linear system in the course of teaching computer control system, a simulation teaching example of MATLAB/SIMULINK is designed to understand and compare the controller design method of computer control system based on continuous domain. The zero-pole placement design controller and digital PID controller of computer control system belong to the design method of digital controller based on continuum theory [1] [2]. Different from the direct design method of the discrete domain of digital controller, it is easy to understand, and it is still used by many scientists and technicians, especially the design method of digital PID controller. In this paper, an example is designed by using MATLAB and SIMULINK simulation [3].
Zero-pole placement controller and PID controller are designed for the same linear system controlled object.

Detailed steps of controller design are given, and the two design methods and system performance are compared. The method of continuous system theory is required to design digital controllers so that the closed-loop system satisfies the steady-state error e(_) = 0, the step response overshoot_%<10%, the regulation time T < 1.2s ( 2% error band), and the sampling period T=0.
1s. It is a generalized continuous controlled object. The SISOTOOL toolbox in MATLAB is used to assign zero and pole points to the generalized controlled object to meet the performance index of the desired closed-loop system. The designed computer control system is verified and simulated in SIMULINK.
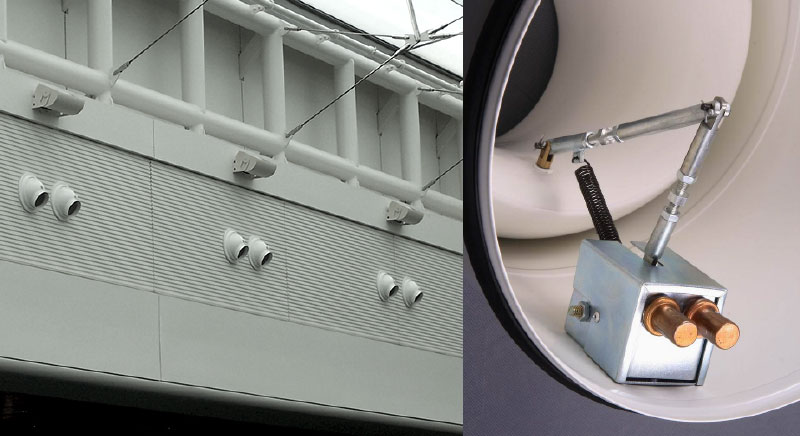
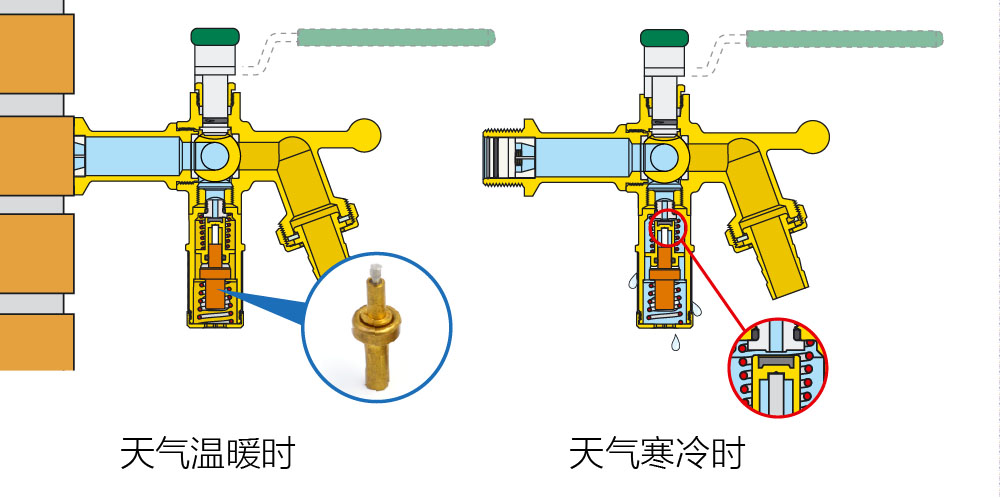
As shown in Figure 4, thermostatic element it can be seen that the designed controller fully meets the expected performance indicators.

The simulation program is written by Simulink as shown in Fig. 5, and a set of reasonable PID parameters (which can be adjusted by critical scale method, etc.) are obtained to meet the expected performance requirements.
The two design methods of digital controllers based on continuous domain discussed above have their own advantages and disadvantages. The pole placement design method is easy to understand the essence of digital controller design, but the process is more cumbersome. The digital PID design method is simple and easy to apply in engineering.