For a class of large time-delay and time-varying systems, this paper mainly puts forward the basic theoretical knowledge of fuzzy control in variable universe, and analyses the means of adaptive fuzzy PID controller control. Relevant researchers organically combine the advantages of conventional fuzzy IPD controller and relevant variable universe fuzzy controller. Up to now, using universe to adjust the parameters of the fuzzy PID controller has a remarkable effect and plays its own role.
Relevant simulation results show that the method can be popularized. Fuzzy controller based on variable universe is an adaptive fuzzy controller. The fuzzy controller with variable universe should be designed with error variation, and it does not need too much domain expert knowledge, as long as it knows the general trend of rules. The domain division and the shape of membership function are not important under the expansion of the domain. Compared with traditional PID control, fuzzy PID control has the ability of restraining overshoot and improving response speed. The disadvantage is that once the design of the fuzzy controller is determined, its structure can not be modified online, so its adaptive ability is limited. Relevant researchers combine the theory of variable universe and the principle of fuzzy PID control to form a new type of fuzzy controller. The parameter precision and the corresponding range of the fuzzy PID controller are adjusted mainly according to the adjusting ability of variable universe.
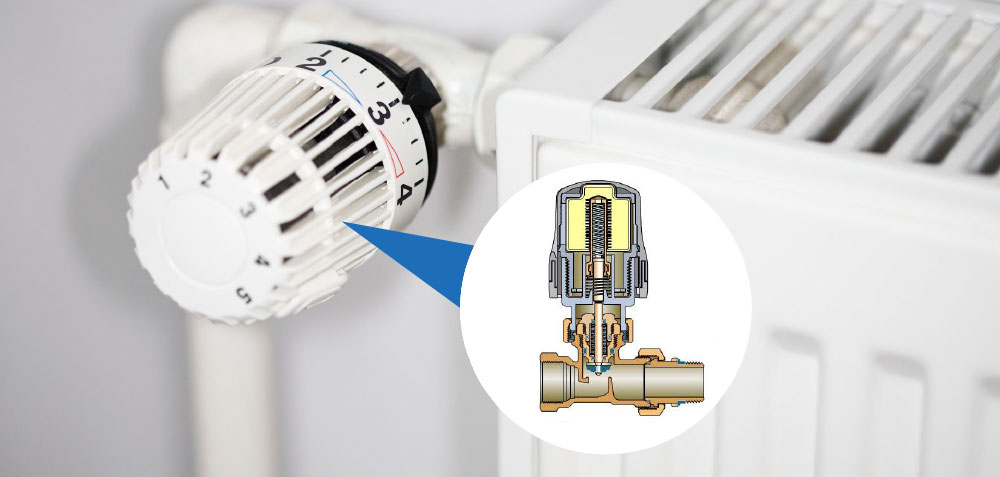
The sunshade can effectively prevent its shortcomings.
According to the investigation, it is found that after adjusting the quantization factors Ke, Kec and corresponding Kp, Ki and Kd in the fuzzy controller, the researchers actually expand or compress the domain of the controller, which is basically consistent with the essence of the variable universe fuzzy control system. The adjusted principles are mainly embodied in the following aspects: first, the relevant researchers enlarge the quantization factor, that is, shrink the input domain, expand the input domain while reducing the quantization factor; reduce the scale factor is essentially shrink the output domain, and release the scale factor. When we are older, we actually magnify the scale factor. Among them, the proportional coefficient K0, the delay coefficient_and the time coefficient T1 and T2 are time variables. The corresponding liquid level system is selected as the control object, and the initial parameters are set as K0 = 1.57, T1 = 52.5, T2 = 52.
5, _ = 14.8s. Relevant researchers present the variable universe adaptive fuzzy PID control system to the simulation block diagram by using MATLAB software. Following is a simulation experiment of the related control, which mainly includes many controls: first, PID control; second, fuzzy PID control (replaced by FPID below); third, variable universe adaptive fuzzy control (replaced by VFPID below) IPD control, which are all in the state of changing object parameters to carry out relevant simulation experiments, and Better FPID control and VFPID two aspects of comparative study. Among them, the step signal delay is in the state of zero, the final value is 1, the generated running time is generally in the range of T = 1000s, o% is the overshoot, and t is the specific adjustment time (of which 2% is the error range).

Fig.

1 is mainly a controlled object and the output curve of the step response generated at the beginning of the parameters. At this time, the relevant personnel in the process of controlling FPID and VFPID have a significant effect. VFPID control can get smaller overshoot, but its own advantages are weaker, the difference between the two control is not much.
However, the results obtained from this simulation experiment are more superior than other related results. Figure 2 shows the output curve when T1 and T2 are changed by 50%. At this time, the FPID control_ = 13, and T1 = 345s, but the VFPID control is about_ = 9, T1 = 345s. It can be seen that the VFPID control can better reflect the advantages of small overshoot, and the resulting robust performance is better than that of FPID control. The output curves of parameters T1, T2 and K0 are formed under the condition of 50% change in figure 3. At this time, FPID control is in the range of σ = 19.5 and T1 = 455s, but vfpid control is mainly in the range of σ = 12.
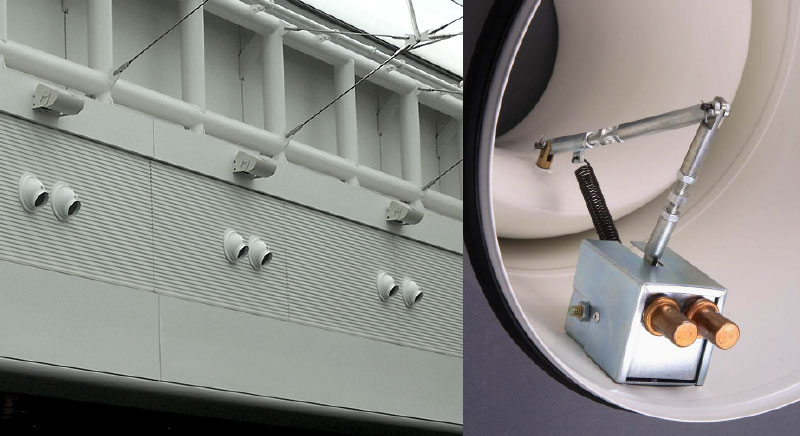
8 and T1 = 400s. It can be seen that the speed generated by overshoot can be effectively prevented by the control of VFPID, and the robustness produced by VFPID is stronger than that of FPID. The main parameters discussed in Figure 4 are the corresponding curves of T1, T2, K0 and_after 50% change. At this time, the range of FPID control is_ = 28, T1 = 470s, while the range of VFPID control by relevant researchers is_ = 20, T1 = 455s. The corresponding overshoot is formed by adopting FPID control, but the stability of the control is not high. But using VFPID control can have a significant effect, thermostatic element can play a role in preventing overshoot, and the resulting robustness is also higher than that of FPID control. From the corresponding simulation results, we can know that VFPID control method has more advantages than other control methods. According to the relevant control theory and simulation, it can be concluded that: (1) For time-invariant time-delay systems, the overshoot of fuzzy PID control can be smaller to some extent than that of conventional mode PID control by adopting variable universe adaptive method. (2) For time-varying systems with time-varying delays, the relevant researchers can control the fuzzy PID in a variable universe adaptive way, which has a more significant effect than the conventional method of fuzzy IPD control, has better robustness, and the output overshoot will be better controlled to a certain extent. (3) Using variable universe adaptive method to control the fuzzy PID, the corresponding speed is more obvious than before.